则张辊轴锻件
什么叫夹送辊、张力辊、测张辊、炉辊、挤干辊、刷辊、我行业是...
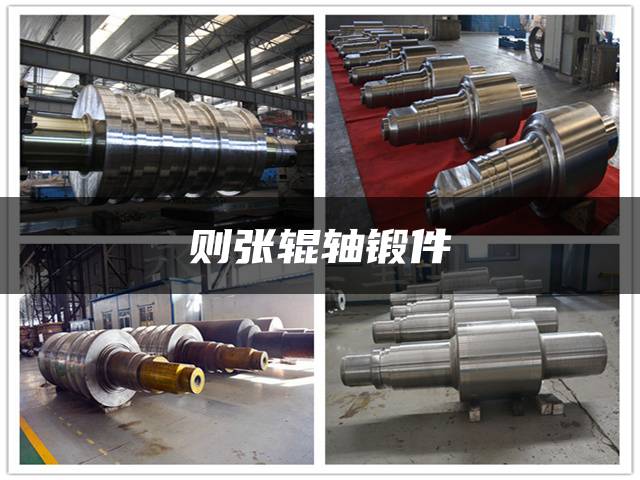
1、夹送辊成对使用,主要作用是传送带料。张力辊也叫S辊,成对使用,带料穿绕过上下辊之间形成S型,通常张力辊带有阻尼装置,以便形成张力。测张辊形式与张力辊相似,只不过有一个辊是浮动的,利用浮动辊的重力在有张力的带料上的位置变化来测量张力。刷辊就是毛刷辊,通过高速旋转刷洗带料表面。
2、夹送辊成对使用,主要作用是传送带料。\r\n张力辊也叫S辊,成对使用,带料穿绕过上下辊之间形成S型,通常张力辊带有阻尼装置,以便形成张力。\r\n测张辊形式与张力辊相似,只不过有一个辊是浮动的,利用浮动辊的重力在有张力的带料上的位置变化来测量张力。
机械臂六轴联动焊接
1、六轴机器人是一种拥有六个旋转关节的多自由度机器人,通常由机械臂和控制系统构成。机械臂结构复杂,由六个关节组成,每个关节由电机驱动,通过链式传动连接,能够灵活地在三维空间中移动。这种结构使得六轴机器人能够在狭小空间内进行精细操作。在描述机器人运动状态方面,运动学模型发挥着关键作用。
2、六轴机器人,作为工业自动化领域的重要组成部分,以其灵活的运动特性被广泛应用在科学研究与生产制造中。这种机器人由六个自由度组成,即六个关节和连杆,形成串联型旋转关节结构。
3、工业机器人的4轴和6轴一个是U轴一个是T轴,都是动作幅度比较大,运动范围最大。4轴焊接机器人的轴数比6轴机器人少两个轴,其部件的灵活性就会迟钝些。六轴焊接机器人最大特点是柔性启动化,柔性制造系统中的一个重要组成部分。
4、六轴工业机器人一般有 6 个自由度,包含旋转(S 轴),下臂(L 轴)、上臂(U 轴)、手腕旋转(R 轴)、手腕摆动(B 轴)和手腕回转(T 轴);6 个关节合成实现末端的 6 自由度动作,具有高灵活性、超大负载、高定位精度等众多优点。
5、首先,要理解6轴机械臂的基本结构。这类机械臂通常由基座、连杆和关节组成,每个关节连接两个连杆,并能绕自身轴线旋转。六个关节提供了足够的自由度,使机械臂能够在三维空间中实现复杂的运动。接下来,确定每个关节的旋转范围是关键。这通常取决于机械臂的设计和制造规格。
hp1008打印机打印第二张出来一半就卡住怎么办?
1、如果纸张卡在双面器处,试着打开双面盖尝试取出纸张。如果难以取出,可以暂时移除墨盒,这样更容易看到并取出卡住的纸张。按照上述步骤操作后,通常可以解决HP1008打印机打印第二张纸卡住的问题。如果问题依旧存在,建议联系专业维修人员进行检查和维修。
2、可能打印机内部有残留纸屑或异物导致卡纸。建议关闭打印机电源,打开打印机盖,检查并清理打印头附近及纸张通道内的异物和残留物。 检查打印设置 确保打印设置正确,例如纸张大小、打印质量等设置与打印机支持的规格相匹配。不合适的设置可能会导致打印机工作异常。
3、首先检查纸盘是否卡纸,取出纸盘,移除损坏的纸张,确保纸张干燥,必要时更换新纸。若纸张卡在打印机中间,查看进纸区,能看见纸张则缓慢拉出。若纸张隐藏,打开打印机顶部盖寻找,切勿强行拉出,以免损伤机器。如果纸张卡在输出区域,从后挡门取出,沿着辊轴操作。
本篇文章给大家谈谈则张辊轴锻件,以及轧辊的轴向调整与固定对应的知识点,希望对各位有所帮助,不要忘了收藏本站喔。